| 2015 | |
|---|---|
 |
Augmented Reality for Virtual Shopping , Research Colloquium at Department of Electrical Engineering, University of Texas at Dallas, USA, Jan., 2015. [bib] |
 |
Scannen und Drucken von Personen in 3D , Nerd Nite, Munich, Germany, Feb., 2015. [bib] [sturm2015_nerdnite.pdf] [sturm2015_nerdnite.pptx] |
 |
3D Reconstruction in Project Tango , ETH Computer Vision Seminar, Dec., 2015. [bib] |
 |
Deep Learning for Virtual Shopping , Deep Learning Summit, Re/work, San Francisco, California, USA, Jan., 2015. [bib] [sturm2015_deeplearning_sf.pdf] |
 |
Deep Learning for Virtual Shopping , Deep Learning Meetup, Munich, Germany, Jan., 2015. [bib] |
| Tracking and Mapping in Project Tango , Dagstuhl Seminar on Vision for Autonomous Vehicles and Probes, Nov., 2015. [bib] |
|
| 2014 | |
 |
Benchmarking at Metaio , TrakMark Panel Session at IEEE International Symposium on Mixed and Augmented Reality (ISMAR) 2014, Munich, Germany, Sept., 2014. [bib] [sturm2014ismar.pdf] |
 |
Efficient 3D Object Scanning , Research Colloquium at Department of Electrical Engineering, University of Texas at Dallas, USA, July, 2014. [bib] [sturm14utdallas.pdf] |
 |
Scanning and Printing Objects in 3D , PCL Workshop at the International Conference on Autonomous Intelligent Systems (IAS) 2014, Padova and Venice, Italy, July, 2014. [bib] [sturm14ias.pdf] [sturm14ias.pptx] |
 |
Novel 3D Sensors , PhD Colloquium of the Computer Vision Group at the Technical University of Munich, Germany, Jan., 2014. [bib] [sturm14groupseminar.pptx] |
 |
3D Object Scanning for Virtual Shopping , RMC Colloquium at the German Aerospace Center (DLR), Oberpfaffenhofen, Germany, Dec., 2014. [bib] [sturm14dlr.pdf] |
| 2013 | |
 |
Visual Navigation and 3D Reconstruction for Flying Robots , Seminar talk at the Robotics, Perception and Real Time Group, University of Zaragoza, Spain, May, 2013. [bib] [sturm13zaragoza.pptx] |
 |
RGB-D Cameras , Vision Understanding and Machine Intelligence School (VISUM), University of Porto, Portugal, July, 2013. [bib] [sturm13visum.pptx] |
 |
Visual Navigation Workshop , CSL Conference, Swedish Computer Science Institute, Stockholm, Sweden, June, 2013. [bib] [sturm13stockholm.pptx] |
 |
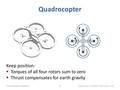
Teaching with Quadrocopters , RSS Workshop on Resource-Efficient Integration of Perception, Control and Navigation for Micro Air Vehicles (MAVs), June, 2013. [bib] [sturm13rss_teaching.pptx] |
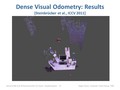 |
Dense SLAM and 3D Reconstruction for Autonomous Quadrocopters , Max Planck Institute for Biological Cybernetics, Tuebingen, Germany, Sept., 2013. [bib] [sturm13mpi.pptx] |
 |
Wie programmiere ich einen autonomen Quadrokopter? , Konferenz für Java, Architektur, Cloud and Agile (JAX), Apr., 2013. [bib] [sturm13jax.pptx] |
 |
Camera-Based 3D Localization and Mapping for Autonomous Quadrocopters , Autonomous Systems Laboratory, ETH Zurich, Switzerland, Feb., 2013. [bib] [sturm13eth.pptx] |
 |
Scanning and Printing Objects in 3D , Computer Graphics Group, University of Bonn, Germany, Oct., 2013. [bib] [sturm13bonn.pptx] |
| 2012 | |
 |
Dense Tracking and Mapping , PCL Tutorial at the International Conference on Intelligent Robot Systems (IROS), Vilamoura, Portugal, Oct., 2012. [bib] [sturm12pcl.pdf] [sturm12pcl.pptx] |
 |
Dense Tracking and Mapping for Autonomous Quadrocopters , Seminar Series of the Robotics Research Group, University of Oxford, UK, Nov., 2012. [bib] [sturm12oxford.pptx] |
 |
Localization and Mapping with RGB-D Sensors , Robot Vision Reading Group at the Imperial College, London, UK, Sept., 2012. [bib] [sturm12london.pptx] |
 |
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , Georges-Giralt-Award Presentations at the European Robotics Forum, Odense, Denmark, Mar., 2012. [bib] [sturm12erf.pdf] [sturm12erf.zip] |
 |
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , Best Dissertation Talk at the European Conference on Artificial Intelligence (ECAI), Montpellier, France, Aug., 2012. [bib] [sturm12ecai.zip] |
| 2011 | |
 |
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , PhD defense, University of Freiburg, Germany, May, 2011. [bib] [sturm11phd.pdf] [sturm11phd.zip] |
 |
Camera-Based 3D Localization and Mapping for Flying Robots , Seminar talk at the Autonomous Intelligent Systems group, University of Bonn, Germany, Dec., 2011. [bib] [sturm11bonn.pptx] |
| 2010 | |
 |
Learning for Mobile Manipulation , 43. VDI/VDE Fachausschusssitzung (GMA FA 4.13), Schwerpunktthema: Steuerung u. Regelung von Robotern, Stuttgart, Germany, Mar., 2010. [bib] [sturm10vde.zip] |
 |
Learning Kinematic Models for Articulated Objects , CoTeSys-ROS Fall School on Cognition-enabled Mobile Manipulation, Munich, Germany, Nov., 2010. [bib] [sturm10ros.pdf] |
| 2009 | |
 |
Learning Kinematic Models for Articulated Objects , Willow Garage, Menlo Park, California, June, 2009. [bib] [sturm09willow.zip] |
 |
Marker-less Object Perception and Articulation Discovery , Stanford AI Lab, Palo Alto, California, Aug., 2009. [bib] [sturm09stanford.zip] |
| 2008 | |
 |
Body Scheme Learning from Self-Perception , SFB/TR 8 Colloquium, Freiburg, Germany, July, 2008. [bib] |
 |
Adaptive Body Scheme Models for Robust Robotic Manipulation , Recent Advances in Neuro-Robotics Symposium: Sensorimotor Control, Freiburg, Germany, July, 2008. [bib] [sturm08neuro.zip] |
| 2006 | |
 |
An appearance-based Visual Compass for Mobile Robots , University of Amsterdam, The Netherlands, Dec., 2006. [bib] [sturm2006msc.pdf] [sturm2006msc.zip] |
| 2005 | |
 |
The Dutch Aibo Team at the University of Amsterdam , Aibo Day, Groningen, the Netherlands, Mar., 2005. [bib] [sturm05aibodag.ppt] |